13761397051
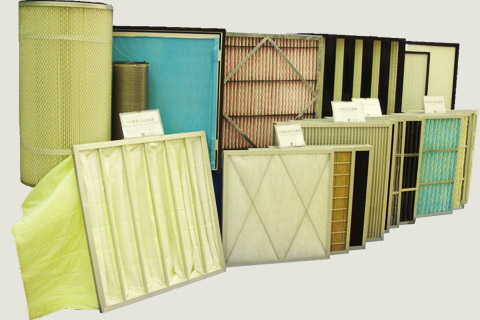
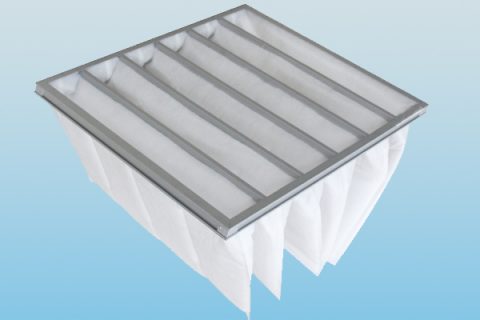
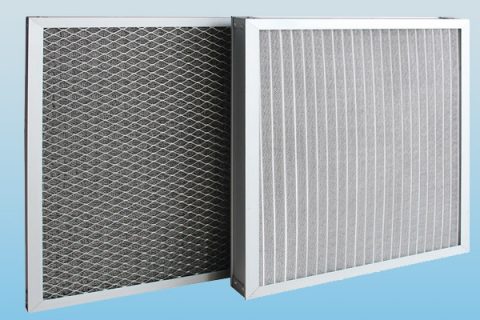
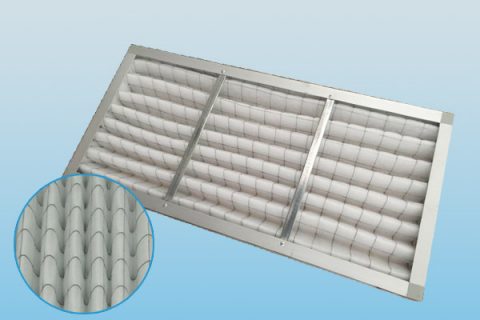
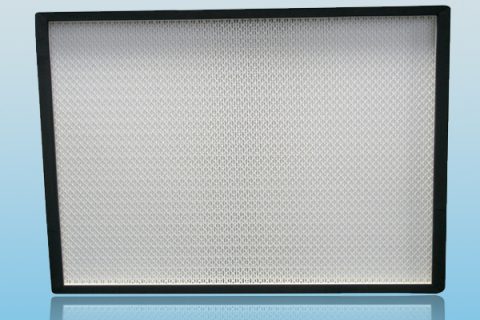
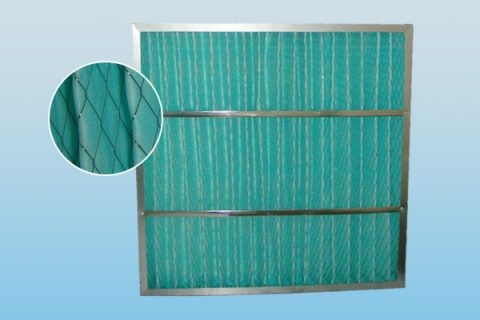
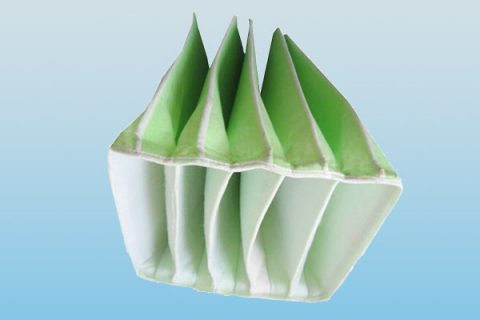
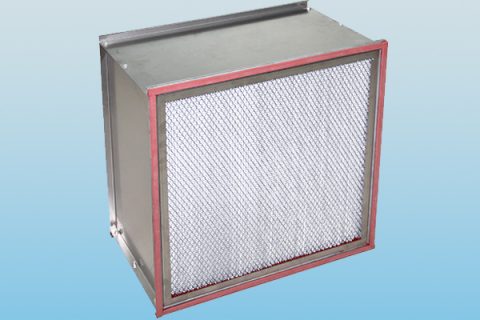
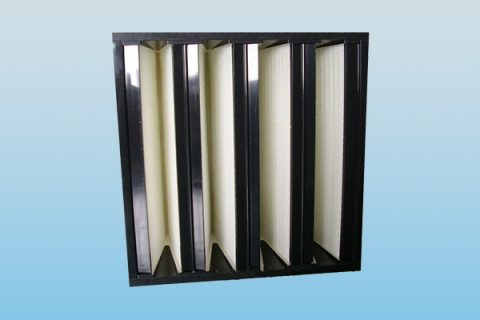
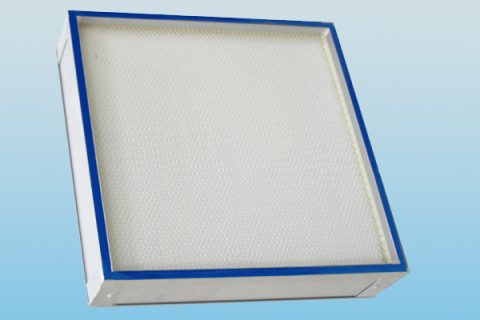
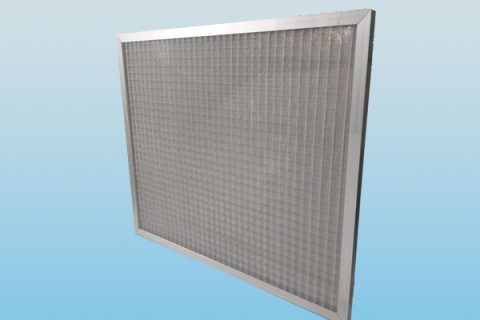
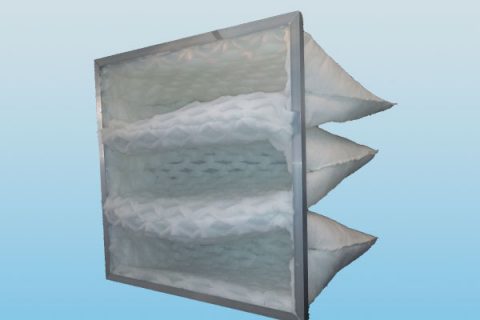
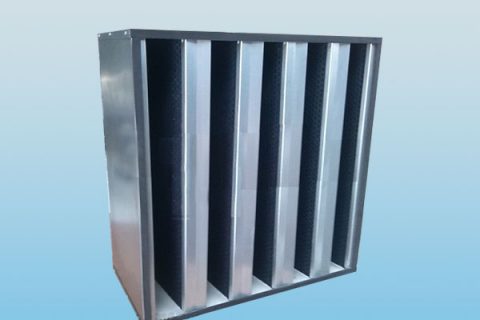
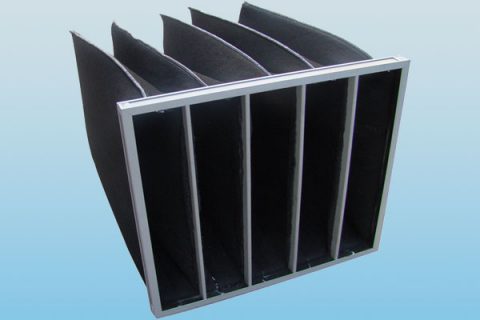
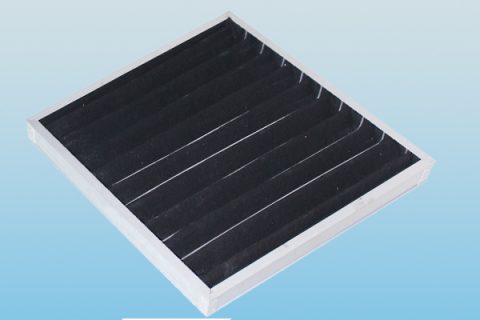
我们从事供应初效/中效/高效过滤器/过滤网多年,拥有丰富的经验,是集批发、销售为一体的厂商。我司已引进初效空气过滤器、中效空气过滤器、高效空气过滤器、初效过滤器、中效过滤器、高效过滤器、耐高温过滤器、压缩机过滤网、有(无)隔板空气过滤器、折叠式滤芯等热销产品;拥有空气过滤器检测线、dop测试仪等检测设备。目前,我们的产品深受国内外客户的青睐。广泛应用于半导体、液晶显示器、光伏、涂装、压缩机、化工、生物医药、医院手术室、食品、科研院所等行业......
漆雾过滤棉是用于漆雾过滤的重要组成部分。定期更换漆雾过滤棉对于保持漆房空气质量和涂装质量至关重要。但是,很多人对于漆雾过滤棉的更换周期和注意事项并不清楚。在本文中,我们将详细介绍漆…
2008-11-12,中华人民共和国住房和城乡建设部批准了《医药工业洁净厂房设计规范》国家标准,标准的编号为gb50457-2008,规定自2009-06-01起实施。gb5045…